
 返回
返回- 媒体报导
- 每一个新动态都是尊龙凯时人生就是博向前迈进的新脚步
尊龙凯时人生就是搏(中国)官网|夏目贵志bg|研究人员开发出开放空间无碰撞轨迹规
盖世汽车讯 开发能够自动驾驶的汽车一直是机器人研究和汽车行业追求的目标◈ღ。虽然多家公司一直在投资和测试这些汽车尊龙凯时人生就是搏(中国)官网◈ღ,但迄今为止◈ღ,各家公司只能在有限的环境中部署这些汽车◈ღ。近年来尊龙凯时人生就是搏(中国)官网◈ღ,研究人员一直在探索所谓的“自主代客泊车(AVP)” 的可能性◈ღ,这种功能可使汽车从停车场入口自动行驶到免费停车位◈ღ。尽管该自动驾驶应用吸引了研究人员的兴趣◈ღ,但迄今为止夏目贵志bg尊龙凯时人生就是搏(中国)官网◈ღ,其可靠实现仍具有挑战性夏目贵志bg◈ღ。
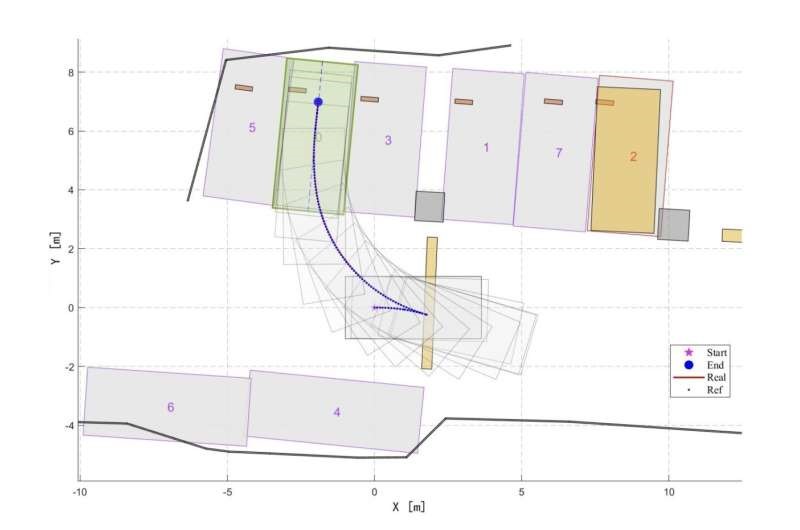
据外媒报道◈ღ,上海Mach Drive的研究人员开发出开放空间无碰撞轨迹规划器(Openspace Collision-freE trAjectory plaNner◈ღ,OCEAN)◈ღ,可用于车辆的自主泊车◈ღ。研究人员已将论文预稿上传至arXiv尊龙凯时人生就是搏(中国)官网◈ღ,其中详细介绍了该规划器可以显著提高汽车安全到达停车位的能力◈ღ,而不会在途中与物体相撞◈ღ。
论文主要作者Dongxu Wang◈ღ、Yanbin Lu及合作者在论文中写道◈ღ:“OCEAN是基于优化的轨迹规划器◈ღ,通过交替方向乘子法(ADMM)加速◈ღ,具有更高的计算效率和鲁棒性◈ღ,适用于所有动态障碍物较少的场景◈ღ。”
研究人员开发的新规划器旨在克服以往自主泊车方法的两个主要缺点◈ღ。其一是无法准确预测碰撞◈ღ,其二是在实时测试中表现不佳尊龙凯时人生就是搏(中国)官网◈ღ。
OCEAN建立在此前引入的基于混合优化的防撞(Hybrid Optimization-based Collision Avoidance, H-OBCA)方法之上◈ღ,并克服了其主要局限◈ღ。改进后的设计最终提高了防碰撞能力◈ღ,以及在实时测试中的鲁棒性和速度◈ღ。
研究人员在论文中写道◈ღ:“从基于分层优化的防撞框架出发◈ღ,轨迹规划问题首先通过无碰撞的混合A*轨迹(Hybrid A* trajectory)进行预热启动◈ღ。然后◈ღ,防撞轨迹规划问题被重新表述为光滑和凸对偶形式夏目贵志bg◈ღ,并由ADMM并行求解◈ღ。优化变量被细分为几组◈ღ,使ADMM子问题被表述为二次规划(QP)◈ღ、序列二次规划和二阶锥规划(SOCP)问题◈ღ,这些问题可以有效且稳健地进行求解夏目贵志bg◈ღ。”
研究人员在数百个模拟场景中测试了该规划器夏目贵志bg◈ღ,并在公共停车场进行了真实世界实验◈ღ。结果非常令人鼓舞◈ღ,他们发现OCEAN在自主泊车应用方面优于此前各种方法◈ღ。
研究人员在论文中解释道◈ღ:“结果表明夏目贵志bg◈ღ,与其他基准相比尊龙凯时人生就是搏(中国)官网◈ღ,我们所提出的方法具有更好的系统性能夏目贵志bg◈ღ,可以实现在需要实时性能的低计算能力平台上部署大规模泊车规划器◈ღ。”
该研究团队开发的规划器可以在其他真实世界试验中进行改进和测试◈ღ。未来◈ღ,汽车公司也可部署该规划器◈ღ,为推动自主泊车技术做出贡献◈ღ。尊龙凯时官方网站◈ღ!尊龙凯时app◈ღ,尊龙凯时官网◈ღ,
